

未来终极方案,将纯视觉与激光雷达完美融合,为自动驾驶技术带来革命性突破。该方案通过高精度激光雷达获取环境信息,结合先进的视觉识别技术,实现精准导航与避障。方案还具备强大的数据处理能力,能够实时分析并处理海量数据,确保自动驾驶的安全与稳定。该方案还具备高度自主化、智能化特点,能够根据不同场景进行自主决策,实现更加人性化、个性化的驾驶体验。未来终极方案将引领自动驾驶技术的新潮流,为人们的生活带来更多便利与乐趣。
马斯克的纯视觉方案是一种完全依赖于摄像头和图像处理技术的感知方案,该方案的核心在于通过多个摄像头捕捉车辆周围的图像,并利用图像处理技术进行目标检测、车道线识别、交通信号识别等任务,这种方案的优点是感知范围广泛,能够覆盖车辆周围360度的环境,且感知距离较远,该方案对算力要求极高,需要强大的计算机硬件和高效的图像处理算法来支持,由于完全依赖于图像识别,对于恶劣天气和夜间等场景下的感知效果可能会受到影响。
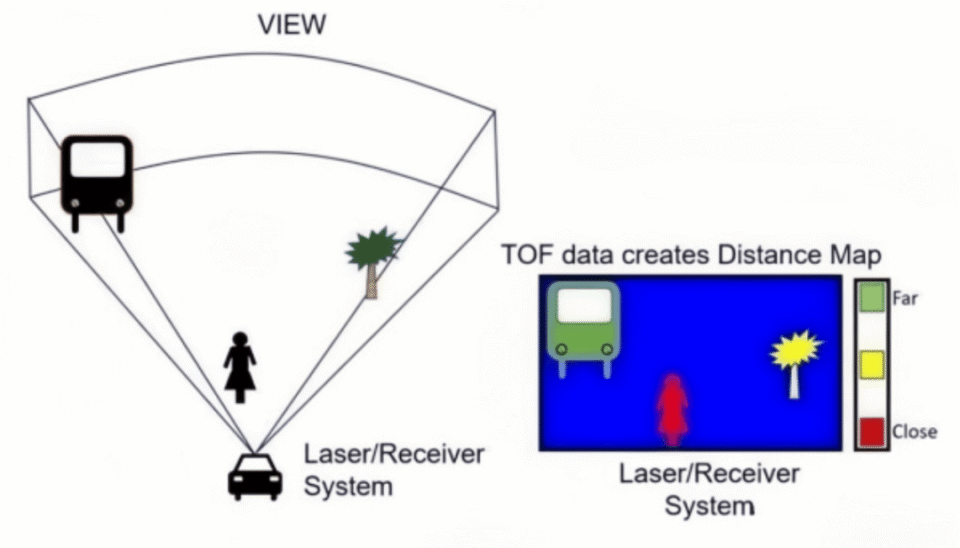
激光雷达方案是一种通过激光雷达设备发射激光束并接收反射光来感知周围环境的技术,该方案的优点是感知精度高、响应速度快,且能够直接获取周围环境的三维信息,激光雷达设备的成本相对较高,且对于激光雷达方案的实施需要专业的技术和经验,激光雷达方案也存在感知范围有限的问题,无法像纯视觉方案那样覆盖车辆周围360度的环境。
考虑到纯视觉方案和激光雷达方案各自的优缺点,未来终极方案可能会是一种将两者优势结合起来的方案,这种方案可能会利用激光雷达设备提供的高精度三维信息来辅助纯视觉方案的感知,从而提高感知的准确性和可靠性,纯视觉方案也可以为激光雷达方案提供感知范围上的补充,使其能够覆盖更广泛的环境。
要实现这种完美结合,需要解决多个技术难题,如如何准确地将激光雷达数据和图像数据进行融合、如何处理不同传感器之间的数据冲突等,随着人工智能、机器学习等技术的不断发展,这些难题可能会逐渐得到解决。
纯视觉方案和激光雷达方案在自动驾驶感知领域都发挥着重要的作用,未来终极方案可能会是一种将两者优势结合起来的方案,从而实现更广泛、更准确的感知,虽然这种方案面临着多方面的挑战,但随着技术的不断进步和发展,我们有望在未来看到更加智能、安全的自动驾驶技术。
 沪ICP备10002619号
沪ICP备10002619号